
Dao Động 3
Presentation
•
Other
•
University
•
Easy

Ngọc Huấn Trần
Used 1+ times
FREE Resource
0 Slides • 60 Questions
1
Multiple Choice
2
Multiple Choice

Câu 162 [<DE>]: Cho mô hình dao động như hình vẽ.
Biểu thức động năng của hệ có dạng:
3
Multiple Choice

Câu 163 [<DE>]: Cho mô hình dao động như hình vẽ.
Biểu thức thế năng của hệ có dạng:
4
Multiple Choice

Câu 164 [<DE>]: Cho mô hình dao động như hình vẽ.
Biểu thức hàm hao tán (cản) của hệ có dạng...?:
5
Multiple Choice

Câu 165 [<DE>]: Cho mô hình dao động như hình vẽ.
Gọi T, П, Ф và Q* lần lượt là động năng, thế năng, hàm hao tán (cản) và ngoại lực suy rộng của hệ.
Phương trình Lagrange loại II được áp dụng để thiết lập các phương trình vi phân chuyển động của hệ
như sau:
6
Multiple Choice
7
Multiple Choice
8
Multiple Choice
9
Multiple Choice
10
Multiple Choice
11
Multiple Choice
12
Multiple Choice
13
Multiple Choice
14
Multiple Choice
15
Multiple Choice

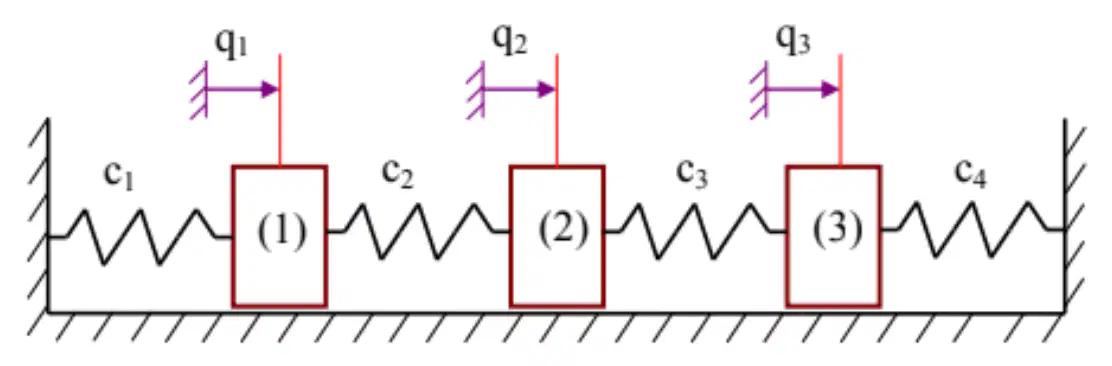
Câu 175 [<TB>]: Cho mô hình dao động như hình vẽ. (Bỏ qua khối lượng của các lò xo; các vật (1), (2) và (3) là cứng tuyệt đối, chuyển động trượt trên mặt nhẵn không có ma sát).
Phát biểu nào sau đây là đúng ?
16
Multiple Choice

Câu 176 [<TB>]: Cho mô hình dao động như hình vẽ. (Bỏ qua khối lượng của các lò xo; các vật (1), (2) và (3) là cứng tuyệt đối, chuyển động trượt trên mặt nhẵn không có ma sát).
Phát biểu nào sau đây là đúng ?
17
Multiple Choice

Câu 177 [<TB>]: Cho mô hình dao động như hình vẽ. (Bỏ qua khối lượng của các lò xo; các vật (1), (2) và (3) là cứng tuyệt đối, chuyển động trượt trên mặt nhẵn không có ma sát).Phát biểu nào sau đây là đúng ?
18
Multiple Choice

Câu 178 [<DE>]: Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số véctơ riêng của cơ hệ (có thể có) tối đa là...?
19
Multiple Choice
Câu 179 [<DE>]: Cho cơ hệ dao động (tuyến tính) như hình vẽ.Số dạng dao động riêng của cơ hệ (có thể có) tối đa là...?
20
Multiple Choice

Câu 180 [<TB>]: Cho mô hình dao động như hình vẽ. (Bỏ qua khối lượng của các lò xo; các vật (1),(2) và (3) là cứng tuyệt đối, chuyển động trượt trên mặt nhẵn không có ma sát).Phát biểu nào sau đây là sai ?
21
Multiple Choice

Câu 181 [<TB>]: Cho mô hình dao động như hình vẽ. (Bỏ qua khối lượng của các lò xo; các vật (1),
(2) và (3) là cứng tuyệt đối, chuyển động trượt trên mặt nhẵn không có ma sát).Phát biểu nào sau đây là đúng ?
22
Multiple Choice
23
Multiple Choice
24
Multiple Choice
25
Multiple Choice
26
Multiple Choice

Câu 186 [<DE>]: Cho mô hình dao động như hình vẽ.
Ma trân khối lượng của hệ được xác định như sau:
27
Multiple Choice

Câu 187 [<DE>]: Cho mô hình dao động như hình vẽ.
Ma trận độ cứng của hệ được xác định như sau:
28
Multiple Choice

Câu 188 [<TB>]: Cho mô hình dao động như hình vẽ.
Ma trận cản (hao tán) của hệ được xác định như sau:
29
Multiple Choice

Câu 189 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức động năng của hệ có dạng:
30
Multiple Choice

Câu 190 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức thế năng của hệ có dạng:
31
Multiple Choice

Câu 191 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức hàm hao tán (cản) của hệ có dạng:
32
Multiple Choice

Câu 192 [<DE>]: Cho mô hình dao động như hình vẽ.Ma trân khối lượng của hệ được xác định như sau:
33
Multiple Choice

Câu 193 [<DE>]: Cho mô hình dao động như hình vẽ.Ma trận độ cứng của hệ được xác định như sau:
34
Multiple Choice

Câu 194 [<TB>]: Cho mô hình dao động như hình vẽ.Ma trận cản (hao tán) của hệ được xác định như sau:
35
Multiple Choice

Câu 195 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức động năng của hệ có dạng:
36
Multiple Choice

Câu 196 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức thế năng của hệ có dạng:
37
Multiple Choice

Câu 197 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức động năng của hệ có dạng:
38
Multiple Choice

Câu 198 [<DE>]: Cho mô hình dao động như hình vẽ.Biểu thức thế năng của hệ có dạng:
39
Multiple Choice

Câu 199 [<DE>]: Cho mô hình dao động như hình vẽ.Ma trân khối lượng của hệ được xác định là:
40
Multiple Choice

Câu 200 [<DE>]: Cho mô hình dao động như hình vẽ.Ma trận độ cứng của hệ được xác định là:
41
Multiple Choice

Câu 201 [<DE>]: Cho mô hình dao động như hình vẽ.Ma trân khối lượng của hệ được xác định là:
42
Multiple Choice

Câu 202 [<DE>]: Cho mô hình dao động như hình vẽ.Ma trận độ cứng của hệ được xác định là:
43
Multiple Choice

Câu 203 [<KH>]: Cho mô hình dao động như hình vẽ.Phương trình vi phân dao động tự do của hệ có dạng là:
44
Multiple Select

Câu 204 [<KH>]: Cho mô hình dao động như hình vẽ.Phương trình vi phân dao động của hệ có dạng là:
45
Multiple Choice

Câu 205 [<TB>]: Cho mô hình dao động như hình vẽ.Phương trình vi phân dao động của hệ có dạng là:
46
Multiple Choice

Câu 206 [<TB>]: Cho mô hình dao động như hình vẽ. Phương trình vi phân dao động tự do của hệ có dạng là :
47
Multiple Choice

Câu 207 [<TB>]: Cho mô hình dao động như hình vẽ. Phương trình vi phân dao động tự do không cản của hệ có dạng là:
48
Multiple Choice

Câu 208 [<TB>]: Cho mô hình dao động như hình vẽ. Phương trình vi phân dao động cưỡng bức không cản của hệ có dạng là:
49
Multiple Choice
50
Multiple Choice
51
Multiple Choice
52
Multiple Choice

Câu 211 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là:...?
53
Multiple Choice

Câu 213 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là:...?
54
Multiple Choice

Câu 214 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là:...?
55
Multiple Choice

Câu 215 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là:...?
56
Multiple Choice

Câu 216 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là:...?
57
Multiple Choice

Câu 217 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ.
Số bậc tự do của cơ hệ là...?
58
Multiple Choice

Câu 218 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là...?
59
Multiple Choice

Câu 219 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là...?
60
Multiple Choice

Câu 220 [<DE>]: . Cho cơ hệ dao động (tuyến tính) như hình vẽ. Số bậc tự do của cơ hệ là...?
Show answer
Auto Play
Slide 1 / 60
MULTIPLE CHOICE
